Welcome to my homepage! It's currently under (perpetual) construction. If you
find anything useful or interesting (or wrong) on the site please get in touch and
let me know.
Warning
This is my first attempt at a proper website so I've been experimenting with some stuff
for fun. One such experiment is seeing if I can use css files to create simple themes
for the site. So far I've only made three (slightly awful) themes which can be tried out
by clicking the links below.
Themes: Grey Grey Light Light Dark Dark
Themes: Grey Grey Light Light Dark Dark
SDP Solver
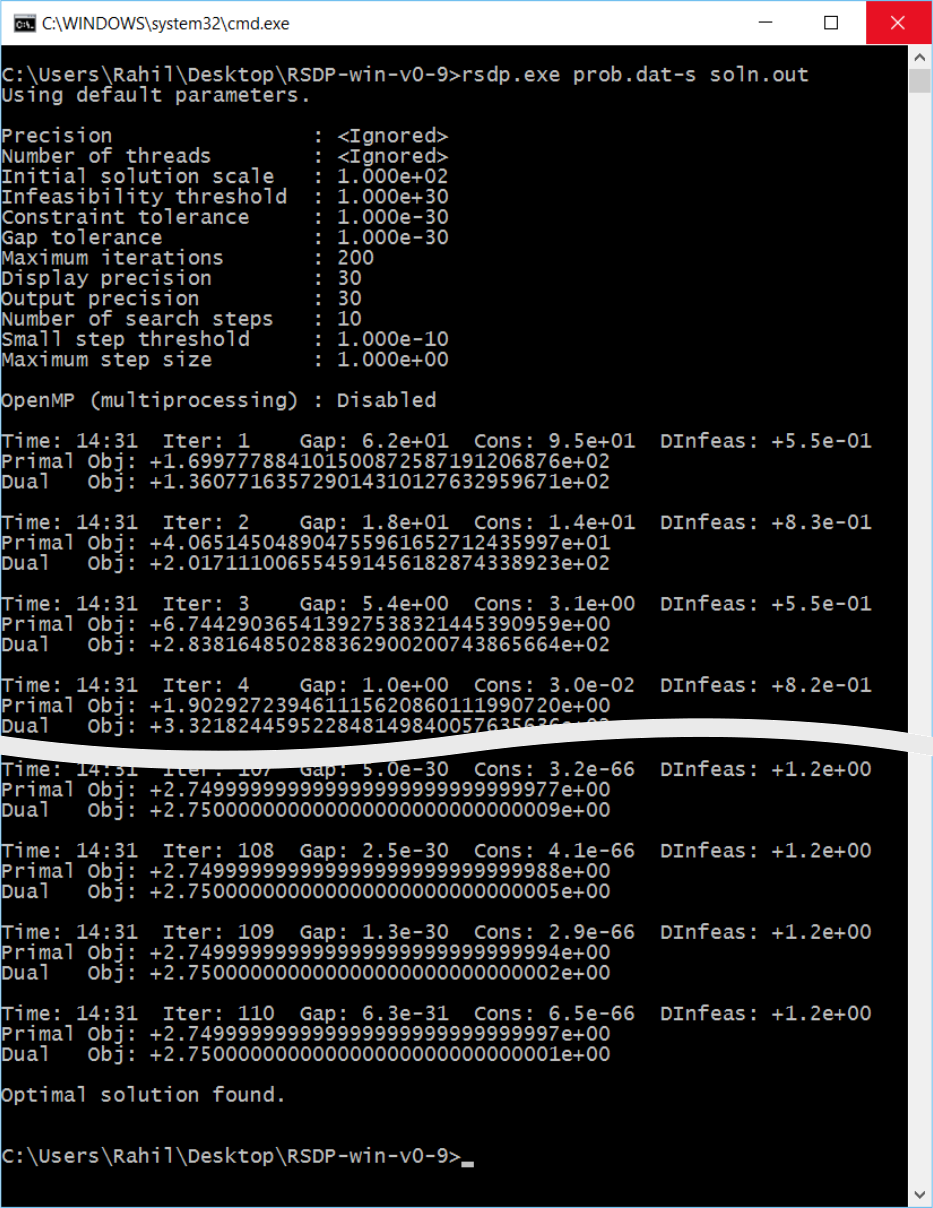 RSDP (Rahil's SemiDefinite Program solver)
is a cross-platform multithreaded multiprecision semidefinite program solver written in C++.
It uses OpenMP to multithread the computation, and GMP or Boost to handle multiprecision calculations.
RSDP (Rahil's SemiDefinite Program solver)
is a cross-platform multithreaded multiprecision semidefinite program solver written in C++.
It uses OpenMP to multithread the computation, and GMP or Boost to handle multiprecision calculations.I'm not quite ready to release the source code just yet as I'm still in the process of optimizing and testing things out. However, you can download a cutdown precompiled version of the program for Windows (multithreading is disabled, and the multiprecision data type has a fixed accuracy of 50 significant figures).
RSDP-win-v0-9.zip (102 KB) - Warning: the zip contains an exe.
Rigid Body Simulation
 A correction to Brian Mirtich's Thesis (PDF 334 KB) -
I noticed a mistake in Brian Mirtich's excellent thesis (that can be currently found
here) so I wrote up a correction.
It describes how to handle collisions with friction in both 3D and 2D.
Although it's pretty informally written it should be easy to follow.
To demonstrate the 2D version of the algorithm described
in the paper I wrote an OpenGL program in C (source code 22 KB)
and then later, for fun, an Html5 version of the same demo.
I wanted to keep the source code as simple as possible, so they're not interactive and don't really do much.
(I'd like to take the opportunity to thank Martin Baker of EuclideanSpace
for hosting the paper on his site.)
A correction to Brian Mirtich's Thesis (PDF 334 KB) -
I noticed a mistake in Brian Mirtich's excellent thesis (that can be currently found
here) so I wrote up a correction.
It describes how to handle collisions with friction in both 3D and 2D.
Although it's pretty informally written it should be easy to follow.
To demonstrate the 2D version of the algorithm described
in the paper I wrote an OpenGL program in C (source code 22 KB)
and then later, for fun, an Html5 version of the same demo.
I wanted to keep the source code as simple as possible, so they're not interactive and don't really do much.
(I'd like to take the opportunity to thank Martin Baker of EuclideanSpace
for hosting the paper on his site.)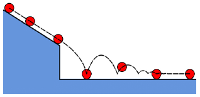 Rigid Body Simulation (PDF 2.8 MB) -
My University of Warwick MSc thesis
(see e-thesis).
It seems to get cited every now and then, so I thought I'd better put it online.
It covers some of the basic principles and formulas of the area.
To go with the thesis there is some source code
(zip 4.2 MB, warning the zip contains exe files)
and 15 videos (available under 3 different codecs, hopefully one will work on your system):
XviD (zip 8.0 MB),
DivX (zip 13.0 MB),
Microsoft MPEG-4 Video Codec V3 (zip 24.1 MB).
Rigid Body Simulation (PDF 2.8 MB) -
My University of Warwick MSc thesis
(see e-thesis).
It seems to get cited every now and then, so I thought I'd better put it online.
It covers some of the basic principles and formulas of the area.
To go with the thesis there is some source code
(zip 4.2 MB, warning the zip contains exe files)
and 15 videos (available under 3 different codecs, hopefully one will work on your system):
XviD (zip 8.0 MB),
DivX (zip 13.0 MB),
Microsoft MPEG-4 Video Codec V3 (zip 24.1 MB).
Maths
Some Results In Extremal Combinatorics (PDF 832 KB) - My PhD thesis (2011). It contains a few unpublished results. There is also a CD-ROM (zip 1.12 MB) that accompanies it, containing source code, and data files.
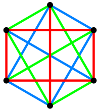
Induced Turán Hypercube Data (2013) (zip 2.18 MB) - Some upper bounds on the Turán density of induced hypercubes created for John Goldwasser and John Talbot. Some of the vertex results were independently reproven in the paper Some exact values of the inducibility and statistics constants for hypercubes, by Levente Bodnár, and Oleg Pikhurko.
Papers (links are to the free arXiv copy of the papers):
 A collection of open problems in celebration of Imre Leader's 60th birthday,
R. Baber, N. Behague, A. Calbet, D. Ellis, J. Erde, R. Gray, M.-R. Ivan, B. Janzer, R. Johnson, L. Milićević, J. Talbot, T. S. Tan, and B. Wickes,
arXiv:2310.18163 [math.CO], (2023).
A collection of open problems in celebration of Imre Leader's 60th birthday,
R. Baber, N. Behague, A. Calbet, D. Ellis, J. Erde, R. Gray, M.-R. Ivan, B. Janzer, R. Johnson, L. Milićević, J. Talbot, T. S. Tan, and B. Wickes,
arXiv:2310.18163 [math.CO], (2023).
A solution to the 2/3 conjecture, R. Baber, and J. Talbot, SIAM Journal on Discrete Mathematics, 28 (2), 756 – 766, (2014).
Multiple unicasts, graph guessing games, and non-Shannon inequalities, R. Baber, D. Christofides, A. N. Dang, S. Riis, and E. R. Vaughan, Conference paper at The International Symposium on Network Coding, (2013).
Turán densities of hypercubes, R. Baber, arXiv:1201.3587v2 [math.CO], (2012). Deliberately unpublished.
New Turán densities for 3-graphs, R. Baber, and J. Talbot, The Electronic Journal of Combinatorics, 19 (2), P22, (2012).
Hypergraphs do jump, R. Baber, and J. Talbot, Combinatorics, Probability and Computing, 20, 161 – 171, (2011).
The minimal density of triangles in tripartite graphs, R. Baber, J. R. Johnson, and J. Talbot, LMS Journal of Computation and Mathematics, 13, 388 – 413, (2010).
Other Stuff
Because knowledge of smart pointers in C++ is such a common interview question, check out my custom implementation of std::shared_ptr which I call stoppable_ptr. It behaves like a std::shared_ptr but it has a member function called stop() which disables further copies being made.